出行安全 低碳生活 Safe commute, low-carbon life
發布日期:2016-08-12 14:27 作者:張宏利 瀏覽次數:5430
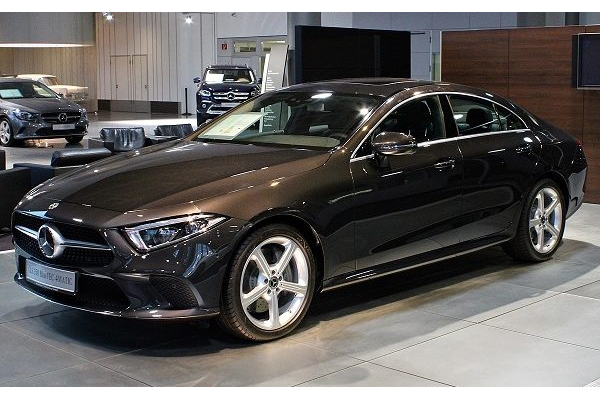
車網中國 綜合新聞 8月4日-8月5日由車云和佐思產研聯合主辦的2016年自動駕駛汽車開發及測試技術研討會在上海舉行。沃爾沃汽車中國區研發總監顧劍民在會上發表演講,他在介紹避撞系統工作機理時分享了一些經驗看法,并談到了自動駕駛所面臨的挑戰。本文由現場演講整理而成。

沃爾沃汽車中國區研發總監顧劍民
主動安全技術是自動駕駛的一個非常重要的基礎,而自動駕駛是主動安全技術的自然延伸,這兩方面的關聯性是顯而易見的。
說到沃爾沃,大家聯想到的第一個印象就是安全。的確,當89年前這兩位瑞典老先生創立沃爾沃的時候,他們就講:“車是由人來駕駛的。因此,我們做任何事情的指導原則必須始終是安全。”沃爾沃到現在為止也的確是遵循了這樣的原則。這里列出了沃爾沃在安全技術領域的部分創新與發明。可以這樣說,今天路上跑的每輛汽車都有沃爾沃的安全技術創新在里面,例如其中大家最耳熟能詳的就是三點式安全帶。
如何研發一款避撞系統
沃爾沃汽車配備了很多主動安全或智能安全方面的技術。其中當然有標配的,也有選配的,組合成不同的配置。這里我稍微著重介紹一下,沃爾沃的City Safety城市安全系統。它其實是一個AEB或者我們常說的自動緊急剎車系統。沃爾沃汽車是全世界第一家把自動剎車系統作為標配的整車廠。
接下來給大家介紹一下沃爾沃汽車避撞系統的發展歷史。在2006年的時候,沃爾沃在全球第一個研發出了帶剎車輔助的碰撞警告系統。第二年也就是2007年,沃爾沃已經對此系統增強了自動剎車功能,成為現在所說的真正意義上的AEB自動剎車系統。2008年,沃爾沃汽車把它命名為城市安全系統City Safety,成為一個技術子品牌。之后的十年中這套系統不斷地更新完善,擴展了許多新的功能,比如增加了行人探測、自行車探測、大型動物、路沿和路障探測與避撞功能。
避撞系統為什么這么重要呢?因為大家說的自動駕駛或無人駕駛,如果沒有做到真正可靠的避撞或者自動剎車、轉向功能的話,一切都是空談。想象一下,如果前面的障礙物你都不能探測到從而進行警告和自動剎車,這將是非常嚴重的問題缺陷。避撞系統的工作機理非常簡單,首先是探測,然后是評估決策,最后是干預,包括警告或者自動剎車。
首先是探測。相比以前,探測功能已經取得了巨大的飛躍。從單個雷達到多雷達和攝像頭,并結合多傳感器融合算法。但是惡劣的天氣和道路狀況依然是一個挑戰。
接下來是決策。早期的威脅探測算法采用簡單的方法來預測單個沖突類型,例如使用至碰撞時間(TTC)探測最危險車輛碰撞。但是你在路上開車,特別是中國的路況,不可能前面只有一個障礙物。所以隨著多傳感器的應用,現實需要更先進的威脅評估算法,可以同時考慮多個對象。新的威脅評估算法包含確定預測或隨機即不確定預測模型來擴展考慮對象。隨著更復雜的傳感器和威脅探測能力,你車周圍的一切都可能是潛在威脅。
復雜的算法肯定會增加計算量,從以前的單目標到現在多目標多威脅的評估,以至到了實時威脅評估變成不可能的地步,有必要進行適當的簡化。但問題是怎么簡化?比如現在大家經常看到的中國式過馬路,一群人一起走,走到路中間,可能有幾個人繼續往前走,有一些人停在那里,另一些人卻往后退,這時候要判斷預測是非常復雜的。所以,由于沖突對象潛在路徑和速度的不可預測性,使得警告和干預措施如何定時、提升相關性和可信度始終受到挑戰。我們必須首先深層次地了解哪些是駕駛員感受到的具有強相關性的威脅,才能提高決策的相關可信度。
最后一步是干預。判斷之后還要有一個干預的策略。干預一般是兩種,先是警告,再可能干預。怎樣警告呢?我們的策略是要使駕駛員接受車輛所給的警告,必須存在一種顧客能夠感受到的并可以應對的威脅。如果沒有可感受到的威脅存在,原則上車輛不應該警告駕駛員。這是因為,如果還是警告,駕駛員可能理解為車輛這樣做沒有合理的原因,從而導致對系統的不信任以及降低系統的效率。時間長了之后,他就會把系統關閉或索性換輛車,在中國的路況環境下,如果一路上都是不停地警告,這的確是個問題。
警告只是一個聲光或振動的信號,那么在警告之后,怎么判斷還要不要車輛自動干預呢?我們的策略依然是:除非是駕駛員近乎無法解決的沖突將要發生,否則車輛不應自主動作,理由也是剛才所說的。可喜的一點是,由于車輛的執行器例如制動和轉向的能力提升,自動干預所需的時間大大縮短了,相比十年以前,越來越多的最后時刻的干預動作變成可能。最后一點,怎么協調人機界面,即駕駛員最后時刻的主動干預與車輛自動干預這兩者之間可能的差異,也將是一個很大的挑戰。
剛剛講了很多,這里來總結一下影響性能的信息警告干預因素。首先是效率問題,要調整警告反應的時間,注意看警告是否使駕駛員反應更快和更有效?警告干預是否可感知與理解?第二是相關性,看警告是否在與真實威脅相關的時刻發出?是正確的警告,還是漏報或誤報?比如說路前方有一輛大卡車,系統把它誤認為是高速路交通標志牌,而不給任何警告,這個明顯是漏報。但是反過來說,如果系統把高速上的交通標志牌判斷成一輛大卡車,從而警告干預,這個就是誤報,這也是第一類和第二類誤報的區別。最后是接受程度,警告是否很高程度被駕駛員所接受、并配合?還是被忽略甚至想盡辦法把它關閉?接受程度當然取決于前面所討論的效率和相關性,所以這三個因素之間要互相平衡。
自動駕駛的挑戰
如果簡單地回顧一下智能安全技術的發展歷程,沃爾沃2006年發明了自適應巡航系統;2007年到08年發明AEB自動剎車的城市安全系統;2009年到12年的列隊行車項目,2012年沃爾沃在西班牙馬德里附近的高速公路上已經首次做了演示和測試;其它還有停車輔助技術、帶輔助轉移向功能的自適應巡航系統等等。最后我還會介紹一個叫做Drive Me的自動駕駛測試項目。
大家或許會問為什么要做自動駕駛?是不是因為最近自動駕駛、無人駕駛炒的很熱?同時還有一些顧客在問,自動駕駛以后,我們的駕駛樂趣在哪里?因為很多人喜歡操控,喜歡在山路或者賽道上開車。
我們完全理解這些考慮,但是如果大家來看看現在大城市的交通狀況,今天早上我走的是中環,走走停停,就像這幅照片中般的擁堵。當然,交通擁堵也不是中國所獨有,隨著城市化進程的加劇,這是全球性趨勢。請問這樣的駕駛樂趣何在?
除了擁堵,還有安全問題,我國每年至少五六萬的交通事故死亡數量。城市化的發展也加劇了空氣污染,以及可持續發展與能源的危機。對各位顧客來講,還有實現實時互聯和出行便利的需求。
所以,自動駕駛對社會、環境和經濟帶來的益處是多方面的。首先,我們的目標是希望通過自動駕駛來提升交通安全,因為統計顯示90%到93%的車輛碰撞事故是人為失誤引起的。如果能通過自動駕駛來減少這90%幾的人為失誤,即使提升不到100%安全,但是97%、99%可不可以?自動駕駛還能連帶產生其它的好處,改善擁堵、節省能源消耗、減少大氣污染,以及使旅途時間利用更高效。
雖然自動駕駛給使用者帶來很多便利,但我們說肯定也有挑戰,世界上沒有免費的午餐。對于使用者來說,有人機交互的挑戰。還有失效模式控制,萬一系統失效以后,怎樣用冗余系統來后備控制。有跟其他車輛系統的交互,你不只是一輛車單獨行駛在路面上。怎么感知環境,在不同的惡劣氣候與極端環境下面正確感知。還有最后一個,再好的系統,當顧客不當使用的時候,怎么做這方面的技術應對處理。對于車輛設計來說,還需要各種各樣的冗余系統做后備,確保自動駕駛安全。
其實,自動駕駛不光是技術問題,更重要的是對社會和倫理的挑戰,大家是不是能接受?首先,什么樣的商業模式,是我們現在繼續賣車的模式,還是改成租車或者分時租賃的共享經濟模式。基礎設施的改變,比如說車道線、公路標識的統一,這也是非常重要的。還有保險公司是否接受,萬一發生事故以后怎么確定是誰的責任。最后是公眾的接受程度,法律和法規的約束,例如最近的某公司的幾起所謂自動駕駛事故引起了公眾和政府對自動駕駛的特別關注,從而也引發了很多相關的討論。
那么沃爾沃的自動駕駛戰略是什么?我們非常明確,這也是一貫的戰略,就是沃爾沃汽車將做自動駕駛技術的領導者,我們也力爭成為自動駕駛車型量產的先行者。
這里舉個最近的例子,我們這一款在SPA平臺上全新開發的S90旗艦轎車,已經在歐洲量產上市,今年下半年也將在中國投放市場。這款車上搭載了一個叫做Pilot Assist的系統,翻譯成中文叫做“高級駕駛輔助系統”,可以使車輛在時速130公里/小時內在高速公路上沿著清晰可辨的車道線自動行駛及轉向,而無需跟隨前車。要知道,之前的ACC自適應巡航系統都是需要有前車跟隨才行的。
我們的目標是要實現沃爾沃2020愿景,那就是到2020年,將不會有人因駕乘全新沃爾沃而遭遇重傷或死亡。這是沃爾沃汽車莊重的聲明,也是一個非常具有挑戰性的目標,怎樣通過自動駕駛幫助將其成為現實呢?
我們認為首先要充分研究,通過真實用戶與真實交通,探討自動駕駛汽車如何支持可持續交通。還要多方的合作,沃爾沃汽車通過與包括供應商、大學研究機構,以及政府部門在內的強強聯合,來應對全球挑戰。自動駕駛之路沒有捷徑,就像練馬拉松一樣。沃爾沃汽車所采取的策略和方法都是逐步、循序漸進的,因為我們堅信自動駕駛的最終目標是安全,我們走的每一步也都要以安全為核心。我們要以客戶為導向,通過提煉典型路況,悉心定義測試所用的通勤道路,同時盡量控制風險。在技術成熟之前,必須反復的測試,以保證安全與可靠。
接下來介紹一下Drive Me自動駕駛測試。右邊列了為什么我們要做這個自動駕駛測試項目:要驗證對社會和經濟帶來的好處,是不是適合當前的交通環境,顧客、社會公眾的接受程度,還有道路基礎設施的支持是不是充分,與其它車輛和道路使用者的互動,最后我們也希望通過這個項目推動政府對于相關法律法規的制定。
這個項目其實已經在2013年正式啟動了,真正的大規模測試將在2017到18年,沃爾沃會向選定的100名租賃客戶提供自動駕駛汽車,讓他們在瑞典哥德堡周圍選定的公共道路上進行自動駕駛測試。這個在全世界也是第一個如此大規模的自動駕駛測試項目。
上圖右邊是哥德堡市區的地圖,這條環路相當于上海的內環或中環,即城市高速交通路,是沒有行人、自行車,也沒有交通信號燈。自動駕駛測試者是租賃顧客,由他們來做為日常通勤車使用駕駛。在駕駛過程中,允許處理其它事務,從駕駛員監控到不監控,從而來驗證沃爾沃的自動駕駛技術。
這里我要講個非常重要的概念,我們討論的自動駕駛肯定是從駕駛輔助逐步漸進發展到自動駕駛。在基于ADAS功能的駕駛輔助階段,駕駛員還是負責監控和指令,必要時,還應盡快接管人工干預,所以還有不少局限性。真正或完全的自動駕駛是無需駕駛員監控,車輛負責監控交通環境,根據路況決策和反應,而駕駛員可以自由利用旅途時間處理其它事。現在一些量產車型的所謂自動駕駛功能,只是某種程度的駕駛輔助功能或高級駕駛輔助功能而已。
我們走向完全自動駕駛的路徑也是同理。目前沃爾沃量產車型上的高級駕駛輔助系統屬于自動駕駛的SAE第2級或半自動駕駛程度,駕駛員需要對駕駛負責。接下來的Drive Me項目將會測試在此基礎上的由第2級以上的功能開發和技術延伸,最后到2020年前后達到完全的自動駕駛,或者SAE第4級的程度,這個階段是由沃爾沃即整車廠對駕駛負責。可以看出,這是兩個階段之間非常明顯的分界線。
自動駕駛車輛系統的主要功能和機理,簡單地講,是通過多傳感器融合,包括單個或數個攝像頭、毫米波雷達、激光雷達、超聲波傳感器等,加上云端和高精度地圖,來感知周圍環境,評估路況和交通狀況,相應決策與控制,最后通過制動、轉向和發動機系統來執行干預。處于安全和可靠的考慮,我們有備份系統,冗余的執行機構,萬一其中一套系統有問題,另外一套系統可以作為一個備份來保證正常行駛。
沃爾沃汽車是個全球運營的國際化公司,所以Drive Me也將會開啟自動駕駛全球驗證之旅。2017年,Drive Me將首先在瑞典哥德堡進行概念驗證,隨后我們將在中國、美國和英國倫敦開展類似的技術驗證。
最后我想重申一下為什么要自動駕駛,自動駕駛的遠景又如何?沃爾沃汽車認為自動駕駛是智能安全技術與創新的自然延伸。如果大多數車輛有自動駕駛功能,車輛可以與人、車、路互相溝通,可以幫助我們早日實現技術層面上的零碰撞和零排放。在去年美國華盛頓的一個自動駕駛研討峰會上,沃爾沃汽車的總裁和CEO正式宣布,當沃爾沃汽車在自動駕駛模式下行駛時,沃爾沃汽車將對駕駛員和車上的乘客承擔全部責任。這是世界上第一家整車廠做出這樣的承諾,這既體現了我們對社會和顧客的責任感,也是基于我們對自動駕駛技術發展的信心。

2022年11月5日,第五屆中國國際進口博覽會在上海正式拉開...

2021澳門車展正式開幕,在本屆車展上寶馬攜3系旅行版亮相現...

2021成都車展前夕,報道團隊提前拍攝到捷途X90(配置|詢...
日前,網通社從官方獲悉,路特斯Emira正式發布。新車由AM...

國產寶馬X5的熱度余溫還在。外媒又曝出新的消息,老牌豪華品牌...