出行安全 低碳生活 Safe commute, low-carbon life
發(fā)布日期:2017-04-21 14:05 來源:網絡 作者:阿偉 瀏覽次數(shù):1167
往期的智能駕駛相關研究周報曾經將汽車智能網聯(lián)功能從消費者感知的角度分為五類(參見《汽車智能網聯(lián)五類功能趨勢和中國車企的應有策略》),并先后介紹了其中的四類功能,本期是同議題的最后一篇,談一下智能泊車。
嚴格地說,智能泊車系統(tǒng)包含兩個部分:
1. 泊車位信息輔助類:在需要的時候,幫助車主找到停車位,甚至提供多處可選的車位,并將汽車導引到合適的停車位;
2. 停車輔助類:包括倒車雷達、半自動的泊車輔助、遙控/全自動泊車,以及代客泊車,這些都是建立在低速行駛和停車位具備的條件基礎上的。
在泊車的功能里面,已經被客戶完全接受的是倒車雷達的報警,還有環(huán)視系統(tǒng)幫助車主看到道路的情況;
從半自動泊車到代客泊車之前的泊車應用,還是需要車主嘗試環(huán)境和使用條件,成功概率不高,所以并沒有給人很爽的體驗。
這兩條,前者是泊車信息化,后者是車輛泊車自動化,其發(fā)展的終極形態(tài)終是合二為一的全自動的代客泊車,停車位的信息化和區(qū)域地圖的信息化還是重要的。

圖1 智能泊車示意圖
一、泊車位信息輔助功能
這一功能說白了就是幫助車主找停車位。
基于系統(tǒng)層的泊車位信息:不少智能導航系統(tǒng)在到達目的地之后,基本都會為車主提供附近停車場信息。大城市的停車難的問題,確確實實影響到了駕車體驗,所以對智能泊車功能而言,第一重要的還是給用戶提供更好的停車方面的信息。
泊車位信息的提供:
常規(guī)的或習慣性的停車地點,車主已經輕車熟路了,無需語音推薦或提供其他選擇;
車輛智能系統(tǒng)后臺通過與公共或半公共停車場的信息進行鏈接,充分把附近停車的價格和使用率的信息收集起來,以合適的方式交互給車主,這一過程就把傳統(tǒng)的車主開到停車場門口詢問門衛(wèi)有無車位的過程給代替掉了

圖2 智能泊車系統(tǒng)尋常地下停車車位的模擬
在進入停車場以后,智能泊車系統(tǒng)把地上各個區(qū)位方向的可用車位、地下不同層樓和不同位置的可用車位信息都發(fā)給車主,目前大部分停車場通過車位上面的燈光顏色提示車位是已經被占用還是空閑。
通過V2X和智慧系統(tǒng),將用戶界面顯示和導航系統(tǒng)打通,這是智能泊車系統(tǒng)發(fā)展的關鍵著力點。
如何把停車位、停車位軌跡在范圍內來做,是個大的命題(牽涉到GPS缺失、慣導的精度問題)

圖3 停車位的軌跡導航和顯示
二、代客泊車功能
號稱可實現(xiàn)完全自主泊車功能的法拉第未來量產車型FF 91,在年初發(fā)布了自動泊車演示,從其現(xiàn)場演示和后續(xù)視頻看,這個代客泊車在有兩排車的場地進行,整個過程是按照標準的代客泊車的功能設計去做的:
1)車主在停車場的入口下車,之后整個過程全部交由車輛本身的智能系統(tǒng)來負責。過程中車主可以選擇通過手機可以與車輛互聯(lián),通過手機HMI界面來了解車輛的情況,車主也完全可以放心讓車去自由發(fā)揮,整個過程“不聞不問”。
2)由于演示車輛所在的停車場沒有智能化的系統(tǒng)支持,因此車輛具備“代客泊車”智能化系統(tǒng)就需要自主決策,從入口處開始尋找停車位,把自己停進去。
演示情況如下圖所示:停車場前面三排停滿了,因此FF91演示的是在一定范圍內尋找空閑車位的能力,圖中藍色是車輛行走的道路,黃色是停車位,綠色是可用車位,上下兩個圖像代表的是兩段視角。
從結果來看,演示車輛從前面三排滿車位開始,沿道路行駛尋找車位,直至最后在第四排第三個停車位停下來。在整個過程中車輛系統(tǒng)主要尋找兩車之間空閑的第一個停車位,因此它忽略了第四排第一個空車位。見下面示意圖。
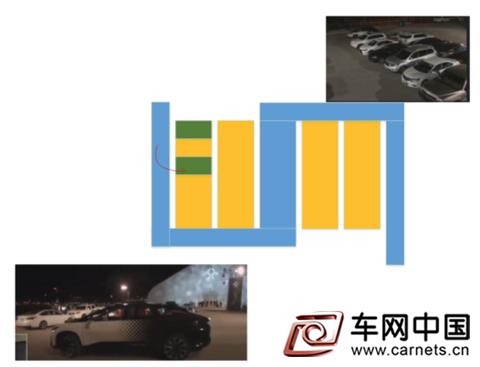
圖4 FF91在CES上所演示的代客泊車
FF91的這種測量方法,類似于之前傳統(tǒng)的泊車入位,使用超聲傳感器來探測可用車位寬度(也可能使用了前面那個16線lidar來生成車位間距、可能使用側邊超聲傳感器量車位)。在這個演示過程中,我們可以發(fā)現(xiàn)在找到車位的整個行駛路徑中并沒有車道線,受測車輛需要在停放車輛、走動車輛、行人、其他障礙物等各類環(huán)境信息中進行判斷,以找到可行駛的區(qū)域,包括:
需要通過對整個其他車輛的停放位置來抽取可行駛區(qū)域
環(huán)境探測方面需要視覺+激光雷達,甚至結合側邊的毫米波radar一起完成對周邊信息的探測
停車場內環(huán)境情況比較復雜,存在障礙物、活動物體(包括車、人),甚至還可能有小孩子在里面
整個過程分兩段,低速找路/尋找車位+停車入庫
其實,法拉第這個自動泊車功能的演示成分還是挺大的,實際來做,需要更多的場景和干擾因素來驗證其實際可行性。不同地區(qū)和不同條件的公共/私人停車場和停車庫,差異也非常大,需要根據各種情況來實驗、分類、學習和重新構造整個功能的設置。
從泊車輔助系統(tǒng)發(fā)展到代客泊車系統(tǒng),這套智能系統(tǒng)需要對整個泊車過程負責,需要對從駕駛員下車到泊車點這段道路距離和環(huán)境的復雜性以及各類可能的意外情況做出正確的判斷,如圖所示,這是扎扎實實的L4的自動駕駛功能,需要對整個行駛過程做出系統(tǒng)性的后備處理:
在之前的場景考慮和要求中,都需要駕駛員在車內操作,對整個過程的安全性負責,車輛只是幫忙計算軌跡路徑,以幫助駕駛員停車入庫。
在完全代客泊車場景下,一旦把人的因素拿掉,情況就完全不同了:對于周圍環(huán)境中車、人和其他障礙物的識別都得交給智能系統(tǒng)來處理
三、自動泊車智能系統(tǒng)的實現(xiàn)路徑
與一個完整速度區(qū)間的L4自動駕駛的架構切合,自動泊車可以對ADS系統(tǒng)的冗余結構進行降級,也可以在剎車部分進行冗余(ESP+EPB),整個路徑的演化,比較核心的點是在哪里需要做到什么、如何進行升級和降級的考慮。
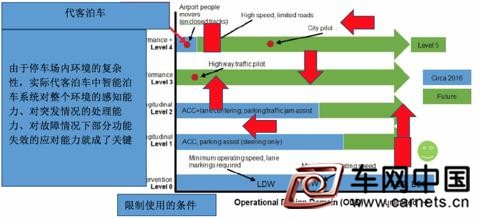
圖5全自動泊車定義的劃分
1.整車的智能化發(fā)展路線
第一步,是車載系統(tǒng)能夠做到讓駕駛員與車輛系統(tǒng)分離,讓車輛系統(tǒng)在離開駕駛員之后,由ADAS系統(tǒng)完全接管原來人的操作,比較典型的就是遙控停車,一般要求人和車在視力所及的地方:
車主可以通過手機可以指揮車輛進行泊車
自動駕駛系統(tǒng)可以控制動力總成系統(tǒng)和剎車系統(tǒng),完成前進、后退和轉向與換檔 ,整個入庫泊車的過程把人覺得最難的那部分工作全部由智能系統(tǒng)接管過去。
下圖就是車主體驗到的比較酷的人在車外面用手機對車輛進行操控,完成泊車的過程。

圖6 炫酷的手表遙控停車
再進一步擴展,就是人下車的過程和停車入庫的過程徹底分離,車輛可以自主完成停車,要達成這一點,需要停車場完成智能改造,通過所配置的終端V2I對車輛進行導引。而要在普通的停車場實現(xiàn)自動泊車,智能車輛需要像駕駛員一樣去找車位。
2.網聯(lián)輔助路線
如同我們現(xiàn)在對于智能道路和智能城市的考慮,自動泊車未來實現(xiàn)的基礎是將一大部分工作交給整個設施,通過智能化的云后臺來處理整個過程——
在限定基礎設施的情況下,可以把很大一部分智能化的工作交給停車場,通過智能停車場主導內部車輛的動態(tài)車位分配;
通過V2X的方式,讓停車場的管理系統(tǒng)與駛進的自動化車輛進行通信,告訴車輛可以停放的車位,下發(fā)地圖和路徑規(guī)劃曲線;
智能車輛根據得到的地圖、車位位置和局部路徑規(guī)劃方案,執(zhí)行整個智能泊車過程,在這個過程中需要規(guī)避車輛、人員和其他障礙物,這些動態(tài)信息的識別與應對需要智能車輛自主進行。
不排除里面會出現(xiàn)一些車隊隊列應用,以實現(xiàn)批量化的車輛位置運轉
3.智能化路線
如果脫開基礎設施,讓整個自動泊車系統(tǒng)由自身進行,通過AI來支持整個路徑規(guī)劃和車位的選取,從而找到可以停車的地方 ,這在某種意義上能更加實用一些——
車輛通過內部的4G網絡與企業(yè)后臺聯(lián)結,獲取必要的信息,看能否獲取遠程的信息;
如果無法獲取相關信息的話,車輛就得完全依靠自己的智能系統(tǒng),在停車場晃悠,尋找潛在的車位;
車輛需要自行規(guī)劃執(zhí)行路線,并與路線上的其他車輛進行博弈,如果找到了停車位還得與同樣選定該車位的人類司機“溝通”下才能順利的停下來。
所以,你看,從嚴格意義上來看自動泊車這件事情還是挺復雜的:如自動駕駛L4的定義,車輛需要完成所有的動態(tài)駕駛任務,需要從應用范圍ODD(Operational Design Domain)上逐步升級。
泊車時速度是低下來了,遇到碰撞市絕對速度所引起的危害稍低,但相對速度的問題還是存在,比如低速穿越路口的車輛被正在高速或正常行駛的車輛給撞了,引起的危害還是不低的。
對于開放式的停車區(qū)域,比如小區(qū)內道路邊上的停車位,要完成自動泊車的情況就更加復雜。

4 月 7 日消息,比亞迪聯(lián)合當?shù)睾献骰锇?GS 公司近期召...

11 月 4 日消息,沙特主權財富基金將與富士康科技集團合作...

11月2日,電動汽車初創(chuàng)公司Fisker表示,該公司將按計劃...

天眼查App顯示,10月31日,美團打車運營主體上海路團科技...

11月1日,北京新誠軟科技有限公司與路德思汽車銷售服務(北京...
關于我們 聯(lián)系方式 招賢納士 隱私政策 車網歷程
Copyright?2004-2030 車網世界版權所有 京ICP證040347號-1 技術支持:想象力